К№УГёЯ№вЧVәНјӨ№вАЧЯ_(dЁў)”ө(shЁҙ)“ю(jЁҙ)…^(qЁұ)·Ц—оҳд(shЁҙ)БЦЦРөДЙъОпГ{ЖИәН·ЗЙъОпГ{ЖИ
ҒҶЦЮМмЕЈЈЁAnoplophora glabripennis, ALBЈ©КЗТ»·NҮА(yЁўn)ЦШНюГ{И«ЗтйҹИ~БЦөДЦыДҫәҰПx(chЁ®ng)Ј¬МШ„eҢҰ(duЁ¬)ЦРҮш(guЁ®)ОчұұёЙәөөШ…^(qЁұ)өД—оҳд(shЁҙ)·АЧo(hЁҙ)БЦФміЙБЛп@ЦшЖЖүДЎЈУЙУЪёЙәөәН ALB Г{ЖИҫщ•ю(huЁ¬)ТэЖрИұЛ®°Y оЈ¬ө«ЖдіЙТтәНЦОАн·Ҫ·ЁҪШИ»І»Н¬Ј¬ј°•r(shЁӘ)…^(qЁұ)·ЦЯ@ғЙ·NГ{ЖИҢҰ(duЁ¬)ЦЖ¶ЁУРР§ЦОАнҙлК©ЦБкP(guЁЎn)ЦШТӘЎЈёЯ№вЧVіЙПсЈЁHSIЈ©әНјӨ№вАЧЯ_(dЁў)ЈЁLiDARЈ©јјРg(shЁҙ)ТтЖдФЪЦІОпГ{ЖИҷzңy(cЁЁ)ЦРөДқ“БҰ¶шӮдКЬкP(guЁЎn)ЧўЈ¬HSI Мṩҫ«јҡ(xЁ¬)өД№вЧVРЕПўЈ¬LiDAR І¶«@№ЪҢУИэҫSҪY(jiЁҰ)ҳӢ(gЁ°u)Чғ»ҜЎЈИ»¶шЈ¬ҶОТ»јјРg(shЁҙ)ҙжФЪҫЦПЮРФЈ¬ҪY(jiЁҰ)әП HSI әН LiDAR ”ө(shЁҙ)“ю(jЁҙ)ДЬүтҸӣСa(bЁі)І»ЧгЈ¬ҢҚ(shЁӘ)¬F(xiЁӨn)ёьҫ«ҙ_өДГ{ЖИҷzңy(cЁЁ)ЎЈұҫСРҫҝІЙУГЖ«ЧоРЎ¶юіЛЦ§іЦПтБҝҷC(jЁ©)ЈЁPLS-SVMЈ©·Ҫ·ЁЈ¬УРР§ҪөөН”ө(shЁҙ)“ю(jЁҙ)ҫS¶ИЈ¬ұЬГвЯ^(guЁ°)¶И”MәПЈ¬МбЙэ·Цоҗ(lЁЁi)ҫ«¶ИЈ¬ЦјФЪЈәЈЁ1Ј©Фu(pЁӘng)№Аҹo(wЁІ)ИЛҷC(jЁ©) HSI әН LiDAR ”ө(shЁҙ)“ю(jЁҙ)…^(qЁұ)·Ц ALB “pӮыЎўёЙәөГ{ЖИј°ҸН(fЁҙ)әПГ{ЖИөДДЬБҰЈ»ЈЁ2Ј©МҪЛчғЙ·N”ө(shЁҙ)“ю(jЁҙ)ҢҰ(duЁ¬)Г{ЖИөДн‘‘Ә(yЁ©ng)МШХчЈ¬әYЯxЧоГфёРөДҷzңy(cЁЁ)ЦёҳЛ(biЁЎo)Ј¬һйёЙәөөШ…^(qЁұ)—оҳд(shЁҙ)ҪЎҝөұO(jiЁЎn)ңy(cЁЁ)әН№ЬАнМṩҝЖҢW(xuЁҰ)ТА“ю(jЁҙ)ЎЈ
СРҫҝөШүKО»УЪЦРҮш(guЁ®)ОчұұІҝёКГCКЎҫЖИӘКРЈ¬ҢЩёкұЪөШГІЈ¬ҡвәтоҗ(lЁЁi)РНһйҙук‘РФёЙәөҡвәтЈ¬ДкҫщҪөЛ®Бҝһй80әБГЧЈ¬ө«ДкҫщХф°l(fЁЎ)БҝЯ_(dЁў)2000әБГЧЎЈұҫСРҫҝЯxИЎБЛғЙӮҖ(gЁЁ)Л®·Ц—lјюІ»Н¬ЈЁ№аёИәН·З№аёИЈ©ЗТҳд(shЁҙ)эgПаҪьөДБЦҲц(chЁЈng)ЈЁҲD1Ј©ЎЈ
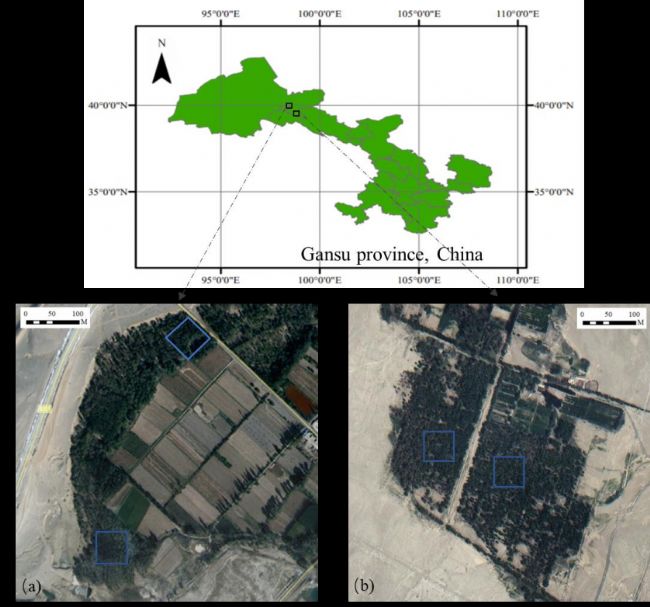
ҲD 1. ұҫСРҫҝөДСРҫҝ…^(qЁұ)УтЎЈЈЁaЈ©ҫЖИӘРВіЗҮш(guЁ®)УРБЦҲц(chЁЈng)ЈЁЛ®ФҙідЧгЈ©ЎЈЈЁbЈ©ҫЖИӘИэәУҮш(guЁ®)УРБЦҲц(chЁЈng)ЈЁИұЛ®Ј©ЎЈЛДӮҖ(gЁЁ)ҳУөШҳЛ(biЁЎo)УӣһйЛ{(lЁўn)Й«ЎЈ
ҳУөШ1ЈЁҲD1aЈ©ЈәҫЖИӘРВіЗҮш(guЁ®)УРБЦҲц(chЁЈng)ЈЁ39°57′NЈ¬98°23′EЈ©ЎЈЮr(nЁ®ng)Мп·АпL(fЁҘng)БЦЈ¬№аёИБјәГЈ¬УРөШұнЛ®Ј¬°ьАЁҪЎҝөБЦәНьSО®ІЎБЦЈ¬ҳд(shЁҙ)эgһй40–60ДкЎЈСРҫҝҳд(shЁҙ)·NһйёКГC—оЎў°Ч—оәНәөБшЎЈҳУөШ2ЈЁҲD1bЈ©ЈәҫЖИӘИэәУҮш(guЁ®)УРБЦҲц(chЁЈng)ЈЁ39°23′NЈ¬99°04′EЈ©ЎЈ№аёИ—lјюҳOІоЈ¬ҹo(wЁІ)өШұнЛ®Ј¬ғЙДкОҙХэіЈ№аёИЎЈБЦ·ЦҪЎҝөБЦәНьSО®ІЎБЦЈ¬ҳд(shЁҙ)эgһй40-60ДкЎЈСРҫҝҳд(shЁҙ)·NЕcҳУөШ1ПаН¬ЎЈғЙӮҖ(gЁЁ)Юr(nЁ®ng)Ҳц(chЁЈng)¶јУРҪЎҝөБЦәНьSО®ІЎБЦөД—оҳд(shЁҙ)ЎЈғЙӮҖ(gЁЁ)Юr(nЁ®ng)Ҳц(chЁЈng)¶јО»УЪәЈ°О1480 mөДЖҪМ№…^(qЁұ)УтЎЈНБИА—lјюПаН¬ЈәЧШЙ«ЙіД®НБЈ¬УРҷC(jЁ©)Щ|(zhЁ¬)ә¬БҝөНЈ¬өӘЛШә¬БҝөНЎЈғЙӮҖ(gЁЁ)ҳУөШҫщұ»ёКГC—оёІЙwЎЈОТӮғ?cЁЁ)ЪГҝӮҖ(gЁЁ)БЦҲц(chЁЈng)ҪЁБўБЛғЙӮҖ(gЁЁ)50×50ГЧөДҳУөШЈ¬№ІЛДӮҖ(gЁЁ)ҳУөШЎЈҝӮ№ІУРЛД·Nоҗ(lЁЁi)РНөДҳУұҫҳд(shЁҙ)ЈәҪЎҝөЈЁHЈ©ЎўғHКЬьSО®ІЎ“pәҰЈЁAЈ©ЎўғHКЬёЙәө“pәҰЈЁDЈ©әНН¬•r(shЁӘ)КЬьSО®ІЎәНёЙәө“pәҰЈЁADЈ©ЈЁҲD2Ј©ЎЈ
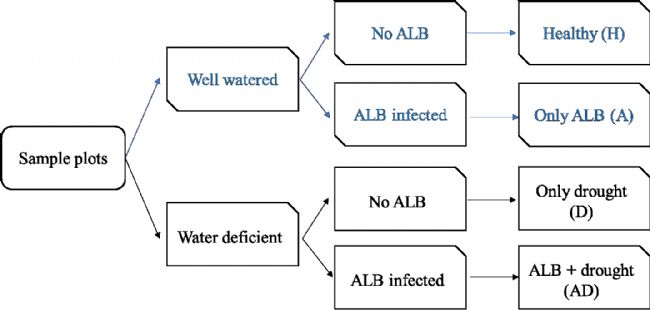
ҲD 2. ұҫФҮтһ(yЁӨn)ЦРөДЛД·N—оҳд(shЁҙ)ЎЈАЁМ–(hЁӨo)ЦРп@КҫБЛГҝ·N—оҳд(shЁҙ)ҳУұҫөДҝsҢ‘(xiЁ§)ЎЈ
ҒҶЦЮйL(zhЁЈng)ҪЗјЧПx(chЁ®ng)ЈЁALBЈ©КЗТ»·Nҳд(shЁҙ)ёЙЦыПx(chЁ®ng)Ј¬НЁЯ^(guЁ°)ЧR(shЁӘ)„eВ©¶· о®a(chЁЈn)ВСҝУЎўЕЕұгҝЧәНҲAРОіцҝЪҝЧЈЁҲD 3Ј©ҙ_¶Ё—оҳд(shЁҙ)КЗ·сКЬ“pЎЈИф°l(fЁЎ)¬F(xiЁӨn)Я@Р©МШХч»тҳд(shЁҙ)№ЪПЎКиЈЁПЎКиИ~Ж¬ЎўёЙҝЭЦҰ—lЈ©Ј¬„tХJ(rЁЁn)һй—оҳд(shЁҙ)КЬөҪ ALB “pӮыЎЈ
И~Гж·eЦё”ө(shЁҙ) (LAI) ·ҙУіИ~Ж¬ГЬ¶Иј°ЙъОпОпАнДЬБҰЎЈІЙУГ SmartLAI ‘Ә(yЁ©ng)УГіМРтҸДІ»Н¬·ҪПтЯM(jЁ¬n)РРЛДҙОңy(cЁЁ)БҝИЎЖҪҫщЦөЈ¬Фu(pЁӘng)№Аҳд(shЁҙ)№ЪПЎКиіМ¶ИЎЈХ{(diЁӨo)ІйБЛ 325 ҝГ—оҳд(shЁҙ)ЈәҪЎҝөЈЁHЈ©66 ҝГЈ¬КЬ ALB Г{ЖИЈЁAЈ©75 ҝГЈ¬КЬёЙәөГ{ЖИЈЁDЈ©80 ҝГЈ¬КЬлpЦШГ{ЖИЈЁADЈ©104 ҝГЈ¬ұн 1 п@КҫІ»Н¬—lјюПВөД LAI ”ө(shЁҙ)“ю(jЁҙ)ЎЈ
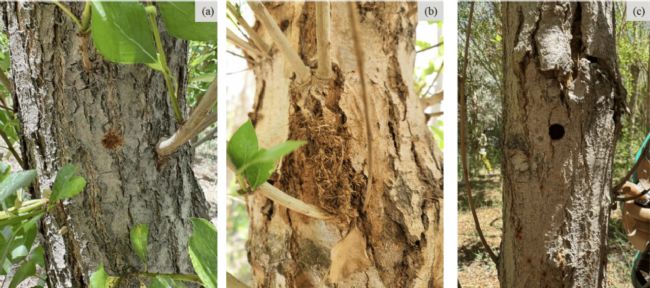
ҲD 3. ҙ_¶Ё ALB “pәҰөДЧC“ю(jЁҙ)ЎЈ(a) ALB іЙПx(chЁ®ng)ФЪВ©¶· оөД®a(chЁЈn)ВСҝУЦРНЪңПЎЈ(b) ALB УЧПx(chЁ®ng)ЕЕіцөДјSұгЎЈ(c) ALB іЙПx(chЁ®ng)өДҲAРОіцҝЪҝЧЎЈ
ұн 1. ЛД·NГ{ЖИ—lјюПВ—оҳд(shЁҙ)БЦИ~Гж·eЦё”ө(shЁҙ)ЎЈ

ФЪН¬Т»пwРР»о„У(dЁ°ng)ЖЪйgЈ¬К№УГ DJI M600 ҹo(wЁІ)ИЛҷC(jЁ©)ҙоЭdIRIS LR-1601јӨ№вАЧЯ_(dЁў)Т»уwҷC(jЁ©)ЈЁұұҫ©АнјУВ“(liЁўn)әПҝЖјјУРПЮ№«ЛҫЈ©КХјҜёЯ№вЧVҲDПс (HSI) әНјӨ№вАЧЯ_(dЁў)”ө(shЁҙ)“ю(jЁҙ)ЈЁҲD 4Ј©ЎЈ°ІСbПөҪy(tЁҜng)К№ёЯ№вЧVәНјӨ№вАЧЯ_(dЁў)ФO(shЁЁ)ӮдДЬүтВ“(liЁўn)әПК№УГҹo(wЁІ)ИЛҷC(jЁ©)өД‘TРФңy(cЁЁ)БҝҶОФӘ (IMU) әНИ«Зт¶ЁО»ПөҪy(tЁҜng) (GPS)Ј¬ҸД¶шҢҚ(shЁӘ)¬F(xiЁӨn)ёЯҫ«¶ИХэЙдРЈХэәН”ө(shЁҙ)“ю(jЁҙ)ИЪәПЎЈҹo(wЁІ)ИЛҷC(jЁ©)ЯҖЕдӮдБЛ RTK ПөҪy(tЁҜng)Ј¬ҝЙҢҚ(shЁӘ)¬F(xiЁӨn)АеГЧјү(jЁӘ)ҫ«ҙ_¶ЁО»ЎЈ2021 Дк 8 ФВ 2 ИХ 12:20 ЦБ 12:50 PM ІЙјҜБЛөШүK 1ЈЁЛ®БҝідЧгЈ©өД”ө(shЁҙ)“ю(jЁҙ)Ј¬2021 Дк 8 ФВ 3 ИХЙПОз 11:50 ЦБПВОз 12:30 ІЙјҜБЛөШүK 2ЈЁИұЛ®Ј©өД”ө(shЁҙ)“ю(jЁҙ)ЎЈпwРРФЪИf(wЁӨn)Апҹo(wЁІ)ФЖөДМмҝХПВЯM(jЁ¬n)РРЈ¬ёЯ¶Иһй 100 ГЧЈ¬ЛЩ¶Иһй 3 ГЧ/ГлЈ¬ХэГжәНӮИ(cЁЁ)ГжҲDПсЦШҜB¶Иһй 60ЈҘЎЈ
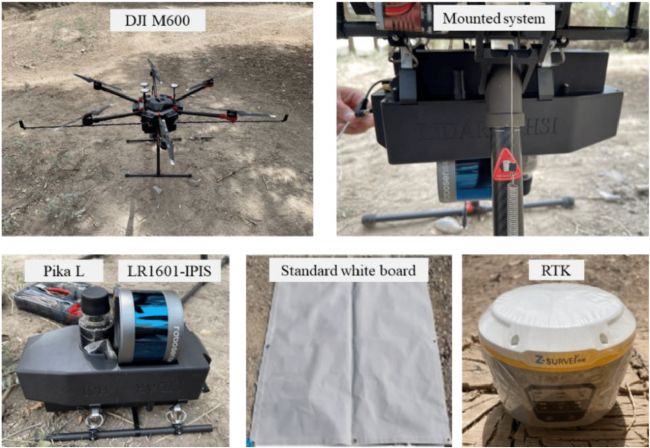 ҲD4.ұҫСРҫҝЦРөДҹo(wЁІ)ИЛҷC(jЁ©)ҙоЭdПөҪy(tЁҜng)ЎЈ
ҲD4.ұҫСРҫҝЦРөДҹo(wЁІ)ИЛҷC(jЁ©)ҙоЭdПөҪy(tЁҜng)ЎЈёЯ№вЧVіЙПсғxөДТ•Ҳц(chЁЈng)һй 10°Ј¬Ҫ№ҫаһй17 mmЎЈёЯ№вЧVҲDПс°ьә¬ 150 ӮҖ(gЁЁ)№вЧVҺ§Ј¬·¶ҮъҸД 400 өҪ 1000 nmЎЈёЯ№вЧVҲDПсТФ 0.1 m өДҝХйg·ЦұжВКЙъіЙЎЈК№УГҳЛ(biЁЎo)ңК(zhЁіn)°Ч°еЯM(jЁ¬n)РР·ҙЙдВКРЈХэәНЭ—ЙдРЈңК(zhЁіn)ЈЁҲD 4Ј©ЎЈёЯ№вЧVҲDПсЕcҫЯУРК®¶юӮҖ(gЁЁ)өШГжҝШЦЖьc(diЁЈn) (GCP) өД LiDAR ”ө(shЁҙ)“ю(jЁҙ)ЯM(jЁ¬n)РРЖҘЕдЈ¬ҝӮуwҫщ·ҪёщХ`Іо (RMSE) < 1 ПсЛШЎЈ
АыУГ LiDAR360 ЬӣјюөД№ЪҢУёЯ¶ИДЈРН (CHM) ·ЦёоҶОҝГҳд(shЁҙ)Ј¬CHM УЙ DSM әН DEM ЙъіЙЈ¬·ЦұжВКһй 0.1 ГЧЎЈёщ“ю(jЁҙ) CHM ·ЦёоҪY(jiЁҰ)№ыМбИЎҳУұҫҳд(shЁҙ)өДёЯ№вЧVәН LiDAR МШХчЈ¬ІўКЦ„У(dЁ°ng)РЮХэеe(cuЁ°)Х`·ЦёоөДҳУұҫҳд(shЁҙ)ЎЈғHУӢ(jЁ¬)ЛгГҝҝГҳд(shЁҙ)№ЪөДк–(yЁўng)№вХХЙдПсЛШөДёЯ№вЧV·ҙЙдВКЈ¬ІўУГ Savitzky-Golay һVІЁЖчЖҪ»¬МҺАнЎЈМбИЎБЛ 23 ӮҖ(gЁЁ)№вЧVЧғБҝЈЁ°ьАЁ 12 ӮҖ(gЁЁ)ЦІұ»Цё”ө(shЁҙ)Ўў5 ӮҖ(gЁЁ)ОьКХҺ§Ўў2 ӮҖ(gЁЁ)јtЯ……ў”ө(shЁҙ)әН 4 ӮҖ(gЁЁ)ОьКХМШХчЈ©ј° 32 ӮҖ(gЁЁ) LiDAR ЧғБҝЈЁ14 ӮҖ(gЁЁ)Еcьc(diЁЈn)ФЖёЯ¶И·ЦІјПакP(guЁЎn)Ўў13 ӮҖ(gЁЁ)ьc(diЁЈn)ФЖҸҠ(qiЁўng)¶ИЦёҳЛ(biЁЎo)әН 5 ӮҖ(gЁЁ)№ЪҢУГЬ¶ИЦёҳЛ(biЁЎo)Ј©ЎЈ№ІК№УГ 55 ӮҖ(gЁЁ)ЧғБҝЯM(jЁ¬n)РРәYЯxЈ¬Іўй_(kЁЎi)°l(fЁЎ) PLS-SVM ·Цоҗ(lЁЁi)ДЈРНЎЈ
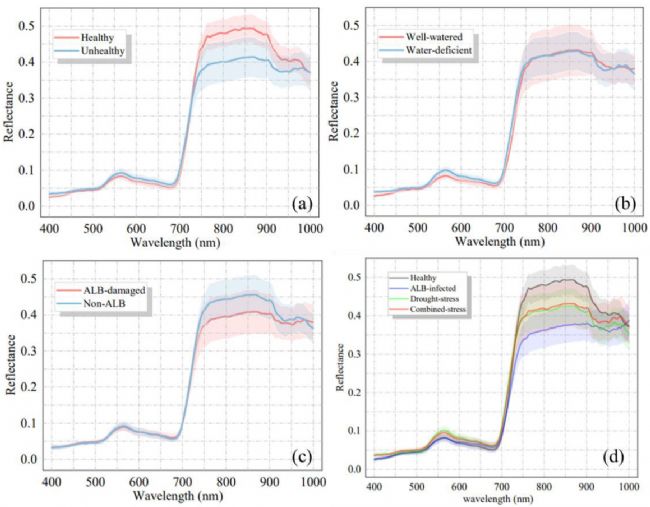
ҲD 5. —оҳд(shЁҙ)өДЖҪҫщ№вЧV·ҙЙдВК°ҙТФПВ·ҪКҪ·ЦҪMЈә(a) ҪЎҝө/І»ҪЎҝөЈ»(b) қІЛ®ідЧг/ИұЛ®Ј»(c) ALB КЬ“p/ҹo(wЁІ) ALBЈ»(d) ҪЎҝө/ALB ёРИҫ/ёЙәөГ{ЖИ/ҸН(fЁҙ)әПГ{ЖИЎЈЧўЈәкҺУ°…^(qЁұ)УтұнКҫЖҪҫщЦөөДҳЛ(biЁЎo)ңК(zhЁіn)Ж«ІоЎЈ
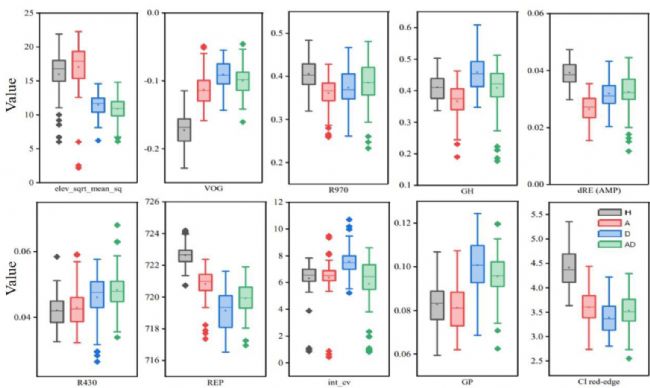
ҲD 6. І»Н¬үәБҰПВёЯ№вЧVәН LiDAR ҲDПсөГіцөДК®ӮҖ(gЁЁ)өдРН…ў”ө(shЁҙ)ЈЁHЈәҪЎҝөЈ»AЈәALB үәБҰ
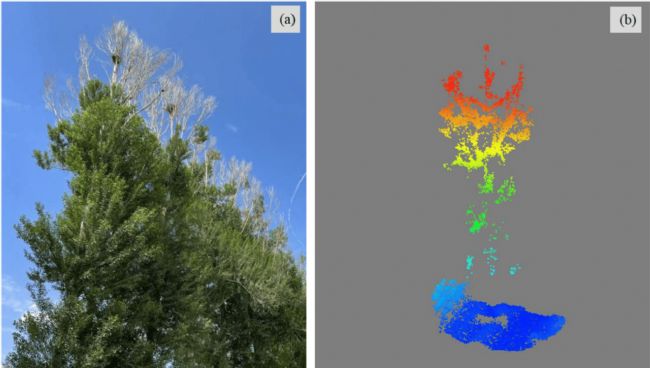
ҲD 7. КЬөҪ ALB “pӮыөД—оҳд(shЁҙ)ёЙЙТЎЈ(a) RGB ҲDПсЎЈ(b) LiDAR ҲDПсЎЈ
СРҫҝұнГчЈ¬ҹo(wЁІ)ИЛҷC(jЁ©)ёЯ№вЧVҲDПсәНјӨ№вАЧЯ_(dЁў)өДҪMәПҝЙТФҷzңy(cЁЁ)әН…^(qЁұ)·Ц—оҳд(shЁҙ)өД ALB әНёЙәөГ{ЖИЎЈPLS-SVM ·Цоҗ(lЁЁi)ФЪ…^(qЁұ)·ЦЛ®·ЦідЧгәНИұЛ®ҳд(shЁҙ)Дҫ·ҪГжҢҚ(shЁӘ)¬F(xiЁӨn)БЛ 94.85% өДңК(zhЁіn)ҙ_ВКЈ¬ФЪҷzңy(cЁЁ) ALB “pәҰ·ҪГжҢҚ(shЁӘ)¬F(xiЁӨn)БЛ 80.81% өДңК(zhЁіn)ҙ_ВКЎЈҢҰ(duЁ¬)ЛД·N—оҳд(shЁҙ)оҗ(lЁЁi)„eЯM(jЁ¬n)РР·Цоҗ(lЁЁi)өДҝӮуw·Цоҗ(lЁЁi)ңК(zhЁіn)ҙ_ВКһй 78.79%ЈәҪЎҝөЎўғHКЬ ALB У°н‘ЎўғHКЬёЙәөУ°н‘ТФј°ёЙәөәН ALB “pәҰІўҙжөД—оҳд(shЁҙ)ЎЈй_(kЁЎi)°l(fЁЎ)өД·Цоҗ(lЁЁi)ДЈРНһйҷzңy(cЁЁ)әН…^(qЁұ)·ЦГ{ЖИоҗ(lЁЁi)РНМṩБЛҢҡЩFөД№ӨҫЯЈ¬К№ј°•r(shЁӘ)ёЙоA(yЁҙ)ҙлК©іЙһйҝЙДЬЈ¬АэИзФЪ—оҳд(shЁҙ)БЦЦРЯM(jЁ¬n)РР№аёИ»тІЎПx(chЁ®ng)әҰ·АЦОЈ¬УИЖдКЗФЪёкұЪЙіД®өДҗәБУ—lјюПВЎЈ

- К№УГёЯ№вЧVәНјӨ№вАЧЯ_(dЁў)”ө(shЁҙ)“ю(jЁҙ)…^(qЁұ)·Ц—оҳд(shЁҙ)БЦЦРөДЙъОпГ{ЖИәН·ЗЙъОпГ{ЖИ
- ёЯ№вЧVіЙПсғxФЪ·¬ЗСјҡ(xЁ¬)ҫъРФИ~°ЯІЎФзЖЪҷzңy(cЁЁ)·ҪГжөД‘Ә(yЁ©ng)УГ
- ҹo(wЁІ)ИЛҷC(jЁ©)¶аФҙЯbёРҪТКҫЖПМСИ~Ж¬Л®„Э(shЁ¬)ҝХйg·ЦІјЈәНБИАЕcҡвәтөДлpЦШУ°н‘
- ҷC(jЁ©)ЭdЦЗДЬЧчОпұнРНПөҪy(tЁҜng)ЦъБҰЦРҝЖФәЯzӮчЕc°l(fЁЎ)УэСРҫҝЛщЧчОпЖ··Nғһ(yЁӯu)Яx
- К№УГИ~ҫGЛШ?zЁҰ)Й№віЙПсЕcёЯ№вЧVіЙПсПөҪy(tЁҜng)ЦъБҰ№ыҢҚ(shЁӘ)Ж·Щ|(zhЁ¬)ҷzңy(cЁЁ)ИЎөГРВН»ЖЖ
- ёЯ№вЧVіЙПсјјРg(shЁҙ)ФЪНБИАУРҷC(jЁ©)Щ|(zhЁ¬)әНөӘФӘЛШҷzңy(cЁЁ)ЦРөД‘Ә(yЁ©ng)УГ
- »щУЪҷC(jЁ©)ЖчТ•УX(juЁҰ)өДЕЈИвЖ·Щ|(zhЁ¬)·Цјү(jЁӘ)ПөҪy(tЁҜng)ј°Жд·Ҫ·Ё
- АыУГёЯ№вЧVіЙПсјјРg(shЁҙ)ҢҚ(shЁӘ)¬F(xiЁӨn)ҝмЛЩКіЖ·®җОпҷzңy(cЁЁ)
- ТЧҝЖМ©Specim AFXПөБРёЯ№вЧVіЙПсПЮ•r(shЁӘ)ғһ(yЁӯu)»Э»о„У(dЁ°ng)й_(kЁЎi)КјАІ
- ЧVиD№влҠҫ«ІКББПа2025ДҪДбәЪЙПәЈ№вІ©•ю(huЁ¬)
- АнјУВ“(liЁўn)әПҲAқM…ўјУҮш(guЁ®)јТЙъ‘B(tЁӨi)ҝЖҢW(xuЁҰ)”ө(shЁҙ)“ю(jЁҙ)ЦРРДУніЗХҫ•ю(huЁ¬)Чh
- ТЧҝЖМ©ёЯ№вЧVіЙПсПөҪy(tЁҜng)ПЮ•r(shЁӘ)ҙЩдN(xiЁЎo)»о„У(dЁ°ng)¬F(xiЁӨn)ТСҶў„У(dЁ°ng)
- АнјУ…ўјУЙӯБЦЙъ‘B(tЁӨi)ПөҪy(tЁҜng)Т°НвХҫУ^ңy(cЁЁ)јјРg(shЁҙ)ТҺ(guЁ©)·¶РыШһ•ю(huЁ¬)
- SpecimКЧПҜЙМ„Х(wЁҙ)№ЩТ»РРҒн(lЁўi)ФLТЧҝЖМ©
- АнјУВ“(liЁўn)әПЧЈЩRЙъ‘B(tЁӨi)ПөҪy(tЁҜng)¶аТӘЛШУ^ңy(cЁЁ)јјРg(shЁҙ)Ҫ»Бч•ю(huЁ¬)ҲAқMҪY(jiЁҰ)Кш
- АнјУЦvЧщөЪИэЭҶНЁЦӘЈәМјЦРәНұіҫ°ПВЙъ‘B(tЁӨi)ПөҪy(tЁҜng)¶аТӘЛШ